Q1GATE 2025NAT
Consider the state-space model
Where are the state, input and output, respectively. The matrices are given below
The sum of the magnitudes of the poles is ________ (round off to nearest integer).
GATE EE · Control Systems
Generate GATE-level questions on State Space analysis. Focus on: 1. State equations, State transition matrix (e^At), and Solution of state equations. 2. Controllability and Observability (Kalman/Gilbert tests). 3. Transfer function from state model and vice versa.
26 questions · 20 PYQs · 0 AI practice · GATE EE 2027
🎯 These are sample questions
Just sign in to unlock everything. Free for all students.
Consider the state-space model
Where are the state, input and output, respectively. The matrices are given below
The sum of the magnitudes of the poles is ________ (round off to nearest integer).
Consider the state-space description of an LTI system with matrices
For the input, , the value of for which the steady-state output of the system will be zero, is ___ (Round off to the nearest integer).
The state space representation of a first-order system is given as where,x is the state variable, u is the control input and y is the controlled output. Let be the control law, where K is the controller gain. To place a closed-loop pole at -2, the value of K is ___________________.
Consider a state-variable model of a system
where y is the output, and r is the input. The damping ratio and the undamped natural frequency (rad/sec) of the system are given by
The transfer function of the system Y(s)/U(s) whose state-space equations are given below is:
Consider the system described by the following state space representation
If u(t) is a unit step input and
, the value of output y(t) at t = 1 sec (rounded off to three decimal places) is_________
Consider a linear time invariant system , with initial condition at t=0. Suppose are eigenvectors of (2 x 2) matrix A corresponding to distinct eigenvalues respectively. Then the response of the system due to initial condition is
In the signal flow diagram given in the figure, are possible inputs whereas are possible outputs. When would the SISO system derived from this diagram be controllable and observable?

Consider the system described by following state space equations
If u is unit step input, then the steady state error of the system is
The state transition matrix for the system
is
The second order dynamic system has the matrices P, Q and R as follows :
The system has the following controllability and observability properties:
The state variable formulation of a system is given as
The response y(t) to the unit step input is
The state variable description of an LTI system is given by
where y is the output and u is the input. The system is controllable for
The system with
is
A system is described by the following state and output equations when u(t) is the input and y(t) is the output The state-transition matrix of the above system is
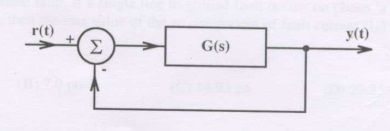
The state space equation of a system is described by , where is state vector, u is input, y is output and
,
, A unity feedback is provided to the above system G(s) to make it a closed loop system as shown in figure. For a unit step input r(t), the steady state error in the input will be
The state equation for the current in the network shown below in terms of the voltage and the independent source V, is given by

For a system with the transfer function , the matrix A in the state space form X=AX+Bu is equal to
A state variable system
, with the initial condition
and the unit step input has the state transition equation
The state variable description of a linear autonomous system is X=AX, where X is the two dimensional state vector and A is the system matrix given by
. The roots of the characteristic equation are
Want unlimited AI-generated State Variable Analysis questions?
Sign up free and practice with adaptive difficulty — Easy, Medium, Hard. New questions every session.
Start practising for free →